










Call us in Seattle
+1 (800) 871-6550
3D Real-Time Computer Vision
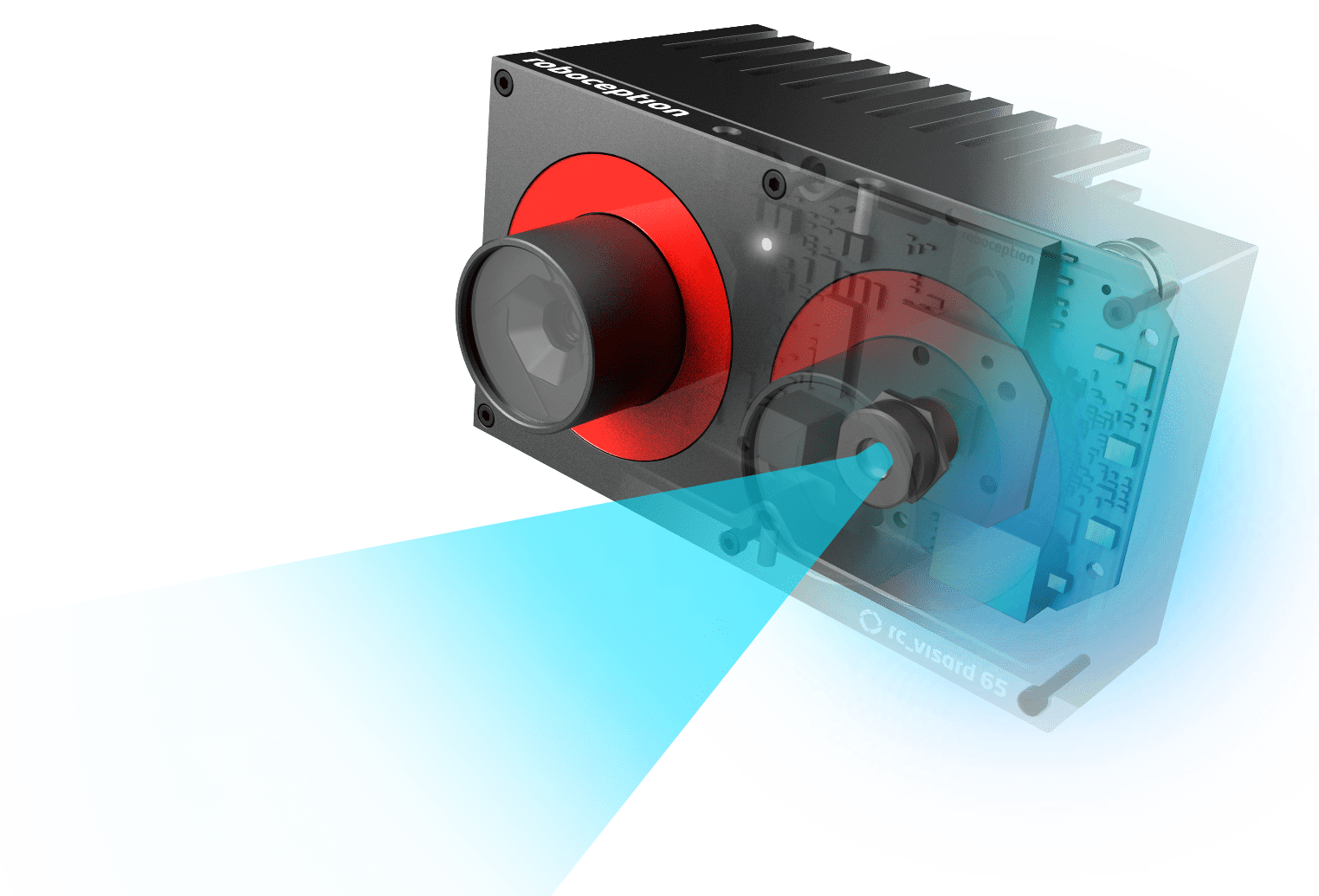
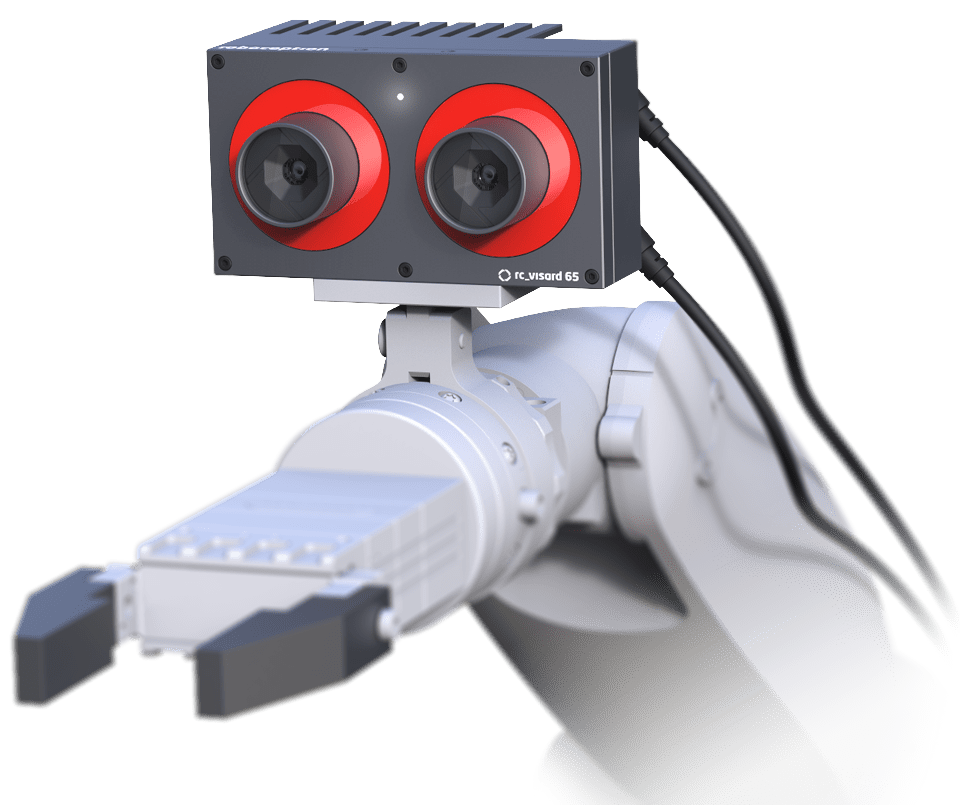
Roboception offers innovative solutions for navigation, real-time perception and manipulation for industrial robotic systems. The rc_visard is the world’s first 3D sensor that allows robots to perceive their environment in 3D and localize themselves in space. rc_visard integrates Toradex’s Apalis TK1 SoM with CUDA-enabled GPU for high-performance onboard processing. It has onboard SLAM (simultaneous localization and mapping) for indoor and outdoor navigation, accurate visual-inertial motion estimation, and standard interfaces for an intuitive WEB-GUI.
Roboception is the proud recipient of the world-renowned design prize iF DESIGN AWARD for its product rc_visard.
Highlights
GPU Compute
Roboception utilizes GPU Compute with Nvidia CUDA. Other technologies supported by Toradex to accelerate demanding computer vision and machine learning applications are OpenCL and OpenVX.
Learn moreHTML 5.0
Web-based User interfaces are getting popular for embedded devices with and without local UI. Toradex built-in fast browsers enable a great user experience.
Learn moreStereo Vision
Toradex products feature MIPI CSI, USB 3.0, and Gigabit Ethernet as popular camera interfaces. This interface combined with optimized image pipelines allow for Stereo Vision application as used by Roboception.
Learn moreGigE Vision / GenICam
Roboception provides a GigE / GenICam interface via the Toradex Apalis TK1 Gigabit Ethernet, allowing the end customer easy integration in a larger system.
Learn more
At Roboception, it is our ambition to make our rc_visard 3D sensor as user-friendly and flexible as possible – which includes running software components and all computing processes on-board the sensor.
Primarily because of its compactness and its industrial applicability, we have chosen the Toradex Apalis TK1 as the on-board computing resource for our rc_visard. On top of that, the attractive price-performance ratio for precisely the performance we require has been an aspect of consideration.
To date, we have not regretted this choice. And we would like to emphasize that we have also learned to particularly appreciate the availability of software support from Toradex, which is not always the case for such products.
Dr. Michael Suppa
CEO and Co-Founder, Roboception
The rc_visard in a nutshell
The rc_visard is a self-registering 3D camera, based on stereo vision, using the SGM (Semi-Global Matching) method. The rc_visard provides real-time camera images and disparity images, also used to compute depth images and 3D point clouds. The rc_visard is an IP54-protected sensor that offers an intuitive web and a standardized GenICam interface, making it compatible with all major image processing libraries.
The rc_visard can work indoors and outdoors, and multiple rc_visard devices can work together without interferences. It comes with several on-board software components, which provide camera images, 3D information, dynamics state estimates, and allow calibration.
Feature your Success Story with Toradex
Wondering how to leverage success for your company with Toradex?
Get in touch with our team and be amazed at what we can offer you!

Starter Kits
Here are some recommended product combinations to get you started. The combinations are fully customizable for your needs.
If you like help to select the best hardware for your project please connect with us.

Low-End Starter Kit
- Up to four Cortex-A53 1.4 GHz processors
- Cortex-M4F processor with speeds up to 400 MHz
- TI AM62X applications processor
- Dual-Band 2.4/5 GHz 1x1 Wi-Fi 4 (802.11n) + Bluetooth 5.2
- Torizon IoT Platform: Linux OS Maintenance, Remote Software Updates & Device Management
- Linux Support included
US$306.00
加入购物车
现代多用途入门套件
- 集成 OTA 和开发工具的免费 Torizon Cloud
- 多个显示接口LVDS/DSI/HDMI
- 高可靠的 Inline ECC Memory
- 机器学习加速器和摄像头接口
- 紧凑且经济
US$428.60
加入购物车

带 Wi-Fi 的高端 HMI 入门套件
- 集成 OTA 和开发工具的免费 Torizon Cloud
- 10.1” 1280x800 电容触摸显示器
- 高端 Wi-Fi ( Dual Antenna 802.11ac)
- Qt / Crank 和 Web UI Demos
US$686.60
加入购物车
Maivin - 模块化全栈 AI 视觉系统


- 全栈解决方案
- 采用 Linux 操作系统,支持 OTA 和设备监控功能的 Torizon Cloud
- 集成 DeepView 和eIQ 机器学习
- 具有 NPU 的 NXP® i.MX 8M Plus 处理器
- 模块化、紧凑设计,适合于现场部署
- 相机传感器